Assuming that C(s) only has simple poles… C(s)=∑i=0ns−pici=[1…1]s−p11…s−pn1c1…cn
Which comes in our form C(s)=C(sI−A)−1B from our State Space Models.
If we call x˙=p1…pnx+c1…cne which is of the form x˙=Ax+Be
and u=[1…1]x=Cx
We can now put this into x+=A^+B^e form
Hint
As a reminder, our goal is to approximate our continuous controllers by emulating them with discrete controllers. Here is how we do that.
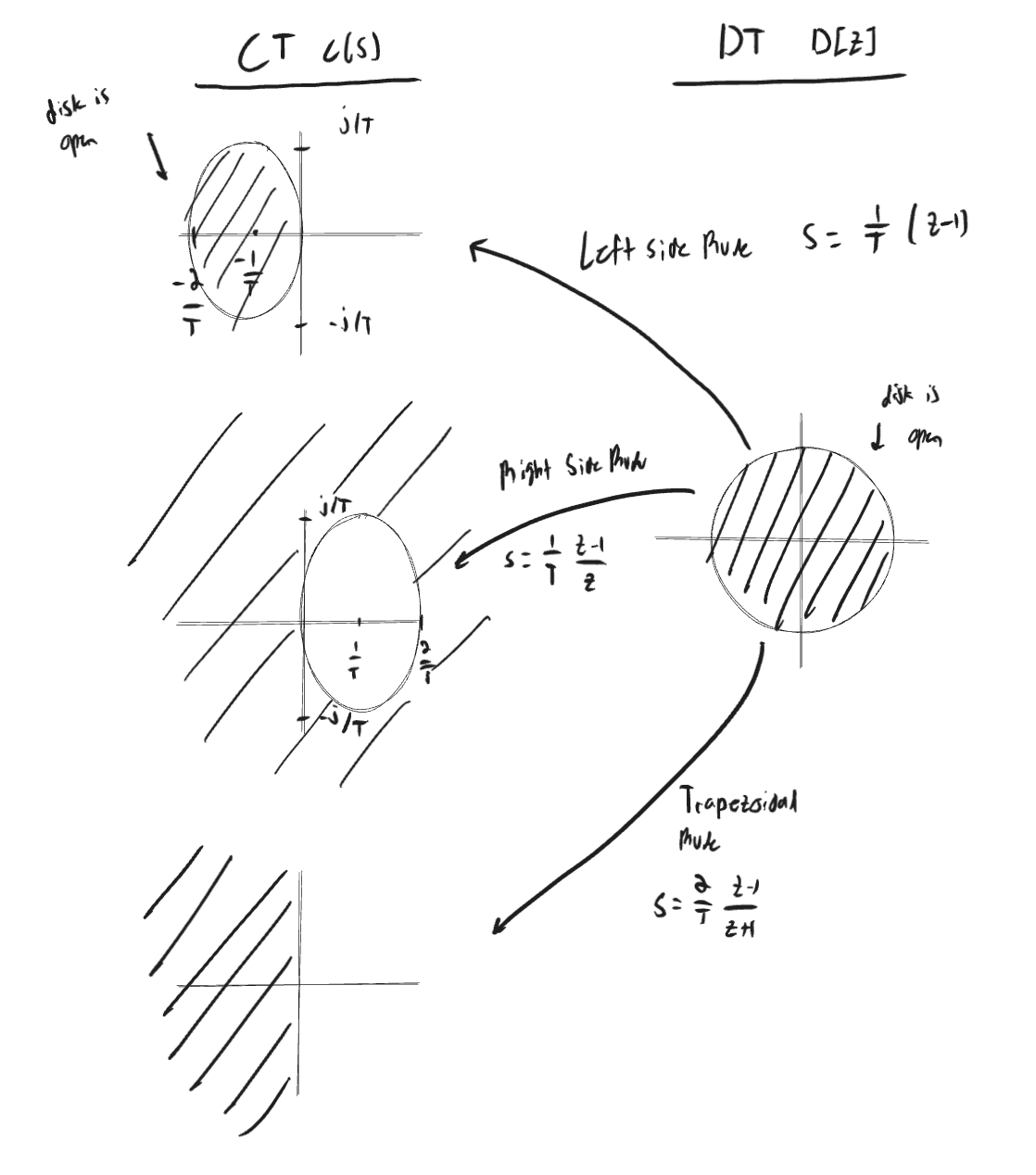
Taking a z-transform… zX[z]=X[z]+T(AX[z]+BE[z])⟹((z−1)I−TA)X[z]=TBE[z]⟹X[z]=((z−1)I−TA)−1TBE[z]⟹X[z]=z−1−Tp11…z−1−Tpn1Tc1…TcnE[z] ⟹u(t)=Cx(t)⟹u[k]=Cx[k]⟹U[z]=CX[z]=[1…1]z−1−Tp1Tc1…z−1−TpnTcnE[z]=∑i=1nz−1−TpiTciE[z]⟹u[z]=∑i=1nT1(z−1)−piciE[z] Where the sum in front of E[z] is our Discrete Time controller D[z]⟹D[z]=C(s)∣s=T1(z−1)
All of our poles are in the left-half plane but, we could have poles that are stable in continuous time that are in the left-half plane, that map to unstable poles in discrete time
Right side rule
We recover the entire left-half plane but, we could have poles that are unstable in continuous time that are in the right half plane, that map to stable poles in discrete time
Trapezoidal rule
Stable poles in continuous time iff we have stable poles in discrete time which is our goal