Uses Input-Output Parameterization
Choose poles as a part of our control design. We approximate where
Warning
When you choose , you need to choose
Note
You can use poles of multiplicity 1 (simple poles) to approximate infinite poles pretty well
Assume plant where are the plant poles.
Assumption has only simple poles.
We can split these poles in stable and unstable components:
Stable: \lbrace{q_{k}}\rbrace^\hat{n}_{k=1} and Unstable: \lbrace{q_{k}}\rbrace^\hat{n}_{k=\hat{n}+1}
Final Result
- Where after comparing coefficients we can conclude…
- Eqn’ 1:
- Eqn’ 2
- (Constraint that V is stable)
- These ‘-’s appear due to the IOP equation
Note on sums and hats and poles and shit
- is the total number of simple poles in (before adding an explicit pole)
- is the total number of poles in after adding explicit poles to a partial fractional expantion
- is the number of distinct stable simple poles that appear in the partial fractional expansion of , typicall this is
- which is the poles whose contributions must cancel
Transient Specs
Informed by Input-Output Parameterization with a Simple Pole Approximation. We use these specs to design a controller.
- Closed-loop stability ⇐> , , stable ⇒ already guaranteed by choosing and satisfying Eqn’s i and ii
- = [by the IOP theorem part b)] =
Case 1.
Sometimes we don’t want this to be 0, for example if we have an integrator in our systen
Case 2.
- Limits on the control effort → step()[k] ≤ C k ≥ 0
- Step response of a simple pole:
- and needs to be bounded by IOP theorem b
- Overshoot
- ⇒ assuming disturbance (d) = 0 where
- step() [ j ] ≤ Where we can sub our and
- step()[ j ] ≤
-
- The left is the step response of and the right is the steady state value of Y (we can go an amount C over Y at any time)
- Settling time
- Let T be the sampling time and let
- Let step()[ j ] ≥ and
Vector Form
This will make it more efficient for us to work with the equations above (IOP equations and the specs).
We can define the following…
Note
Screenshots cause no way am I writing this out
, and
- Here the two matrices of beta are the stable and unstable poles
- You can also see a couple blocks that are the identity matrix, as well as zero matrices
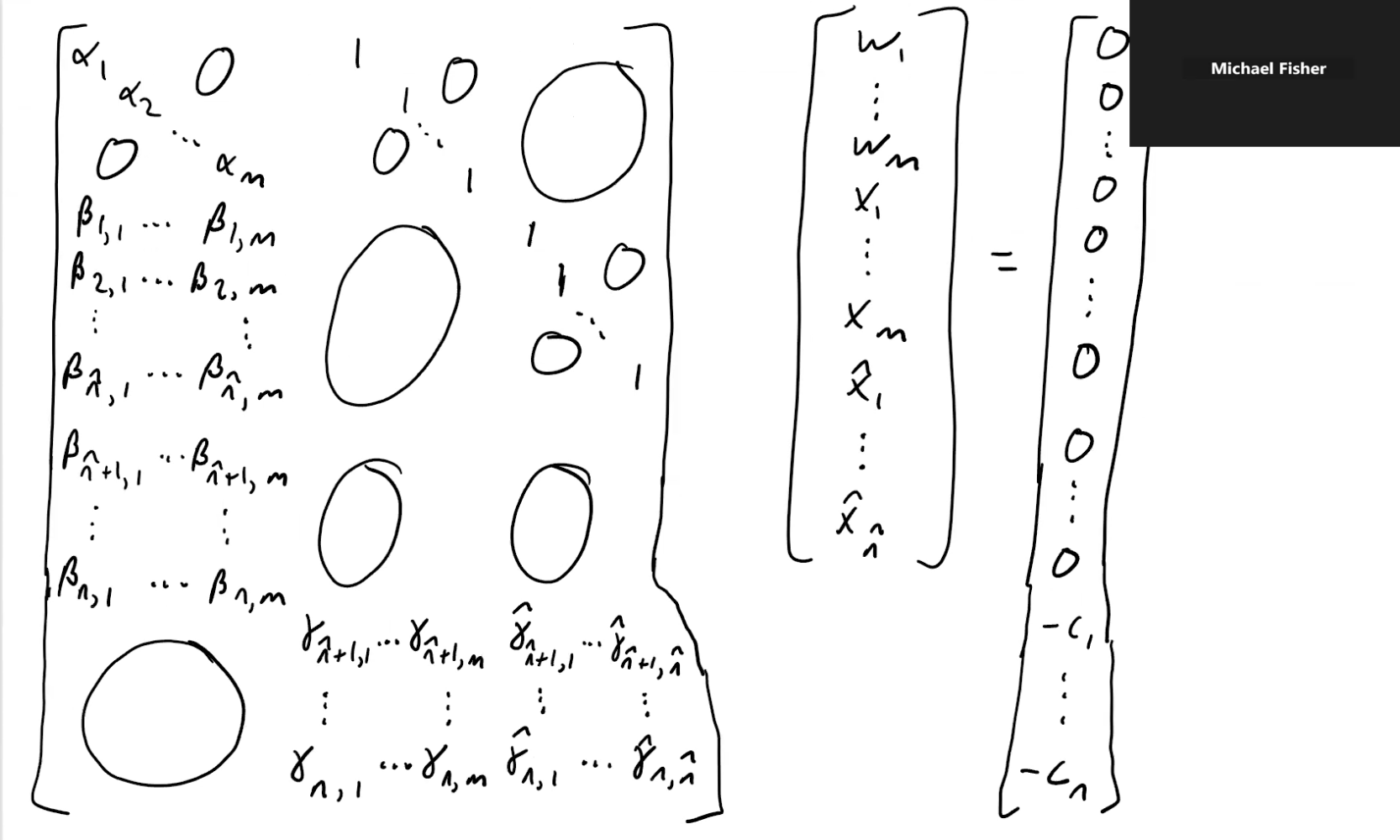
- Here starts from instead of (typo)
We can re-express this larger matrix as…
- Let the first matrix = , and the result =
So the IOP eqn’s are:
Specifications
- where could be
- This matrix in the middle is the matrix
-
- Note: If you don’t reach steady state, choose a larger
- Fix
- Now we can look at the maximum of
-
- The middle TF here is
- Where each of these partial fractions is
- where is the matrix of the step response of
-
-
- Where this middle matrix is
-
-
- Where in matrix notation…
Redefinition of Control Design for IOP with SPA
- Given , ,
- Find a solution to:
- Where:
- And these constraints in our matrix form can be viewed from the notation above
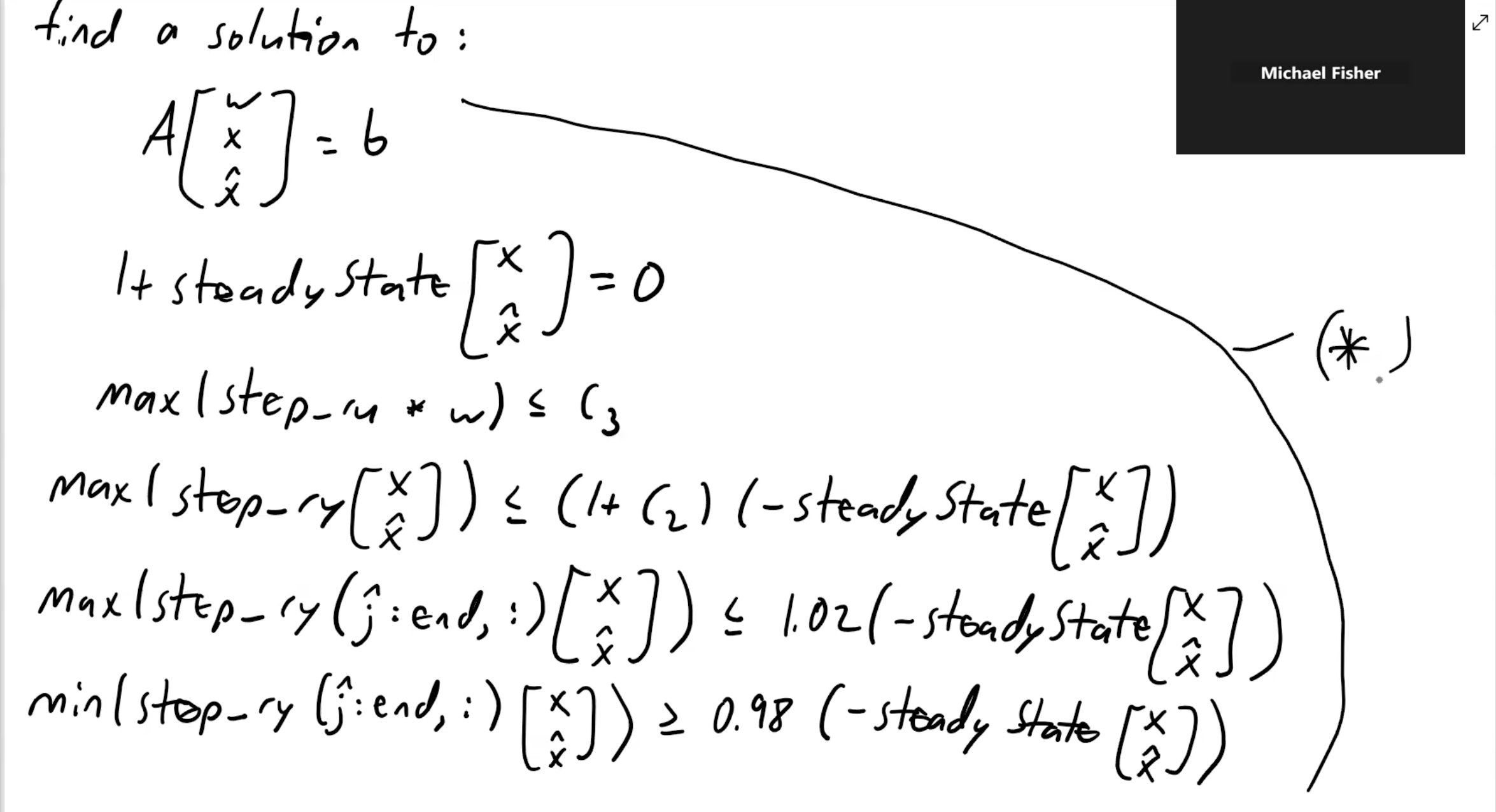
We solve this stuff using a numerical solver
Concepts