Summary
Motivation: Sampled Data Digital Control Systems are not Linear Time Invariant, so we need to move beyond LTI models to be able to analyze sampled data systems.
Finding the actual state space models is the exact same for linear state space realizations.
See Drawing 2025-10-24 11.54.34.excalidraw for examples for this concept.
Rendered Excalidraw

For an LTI model and …
Definition
A non-linear state space model of a system is a model of the form…
- (*)
such that for any initial condition and any input signal , there exists a unique solution to Eq (*), and it is equal to the system’s output.
Note that this is time-invariant since neither functions depend on t
This is a general framework for modelling the dynamics of a system which gives us a well defined solution.
For regular linear State Space Models, we have 2 options as we approach infinity. We either approach 0 or infinity. In non-linear systems, there are other states that we can approach rather than just this binary choice.
Definition (Equilibrium Point)
What does steady state look like in non-linear systems?
Given a constant control signal for some , an equilibrium point of a state space model is any state that satisfies .
Note
You find an equilibrium point, and then you can linearize about that point later!
which implies that . Just set the state space realization to 0 and rearrange for the equilibrium points.
For an LTI system…
If
LTI systems only have 1 equilibrium point for a fixed
Example

We can apply Linearization about . as follows…
We want linearization of the form…
Where is vector valued…
Summary
Basically our steps here are…
- Find the equilibrium points
- Find the partial derivates of
- Make the matrix and evaluate at () (just sub in the values for these)
- Put into the general linearized form
Definition
An equilibrium point is stable if all of the eigenvalues (Eigenvalues and Eigenvectors) of the linearization at are stable in
An equilibrium point which is not stable is called unstable.
Note
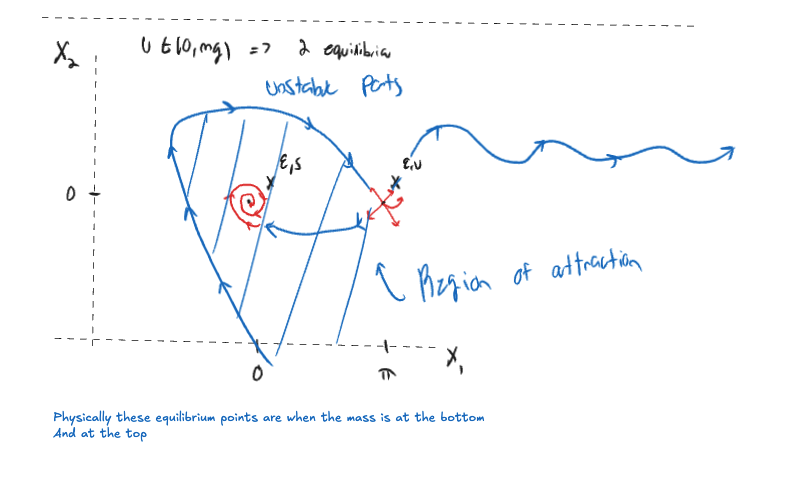
Note that is an unstable equilibrium point because it has an unstable eigenvalue .
Consider the linearization about .
Assume
and it can be shown that A has 2 stable eigenvalues
eigenvector
is a stable equilibrium point
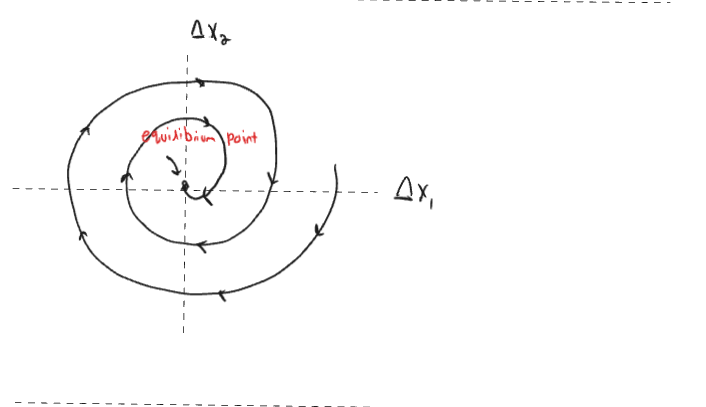
Linear systems are a pretty good approximation of non-linear systems around an equilibrium point.
Definition
The region of attraction of is the set of initial conditions such that then . Where your stable equilibrium point is your desired operating point