Note
This is a way to represent a transfer function as a set of first-order differential equations in vector form
and …
[Excalidraw for this note](Drawing 2025-10-22 11.38.38.excalidraw)
Rendered image for ssg
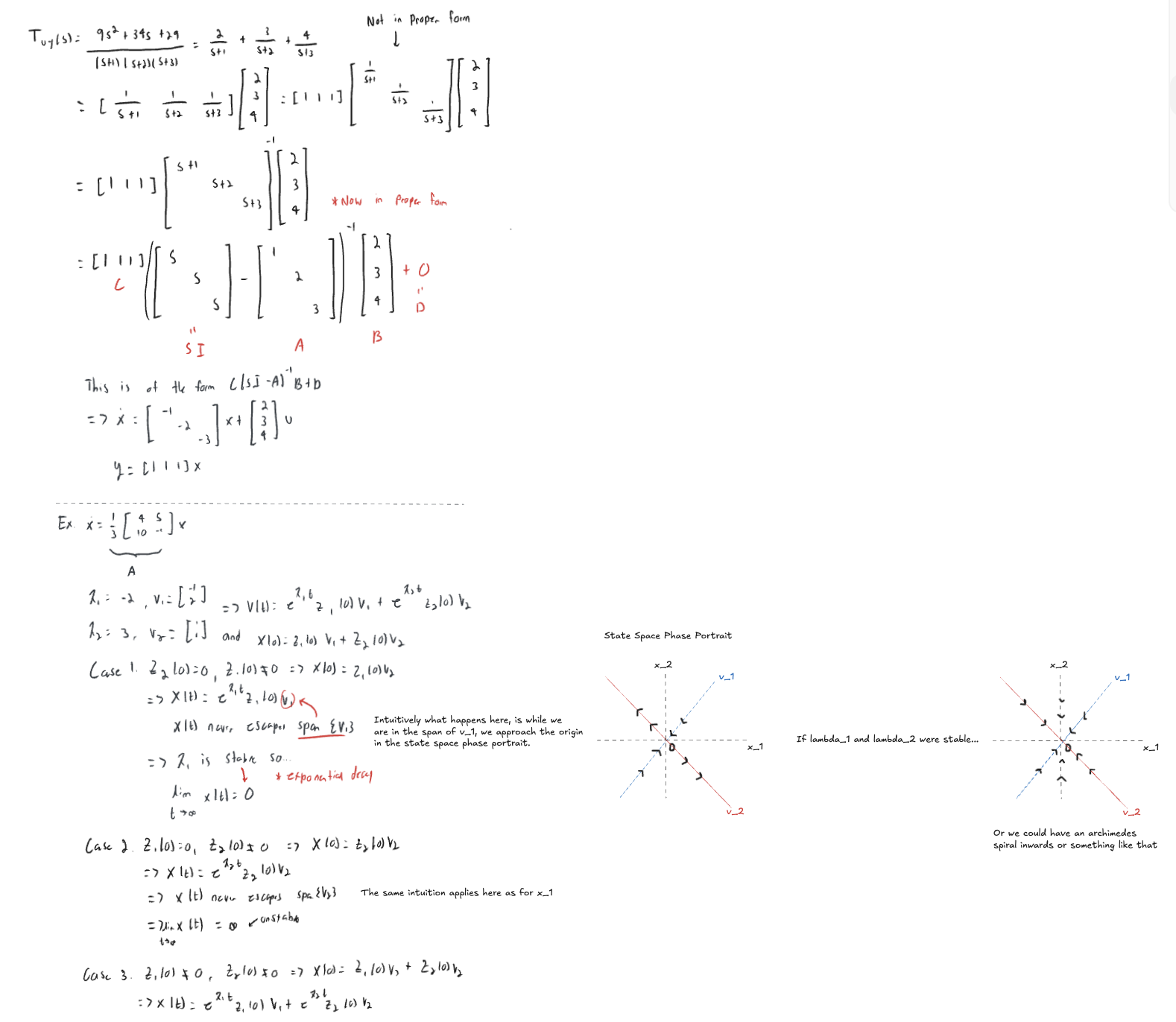
This approach works for any transfer function with only simple poles
Assume and
Assume A is diagonalizable (sufficient condition: all eigenvalues of A are distinct)
Let be the eigenvalues of A
Let be their associated eigenvectors (of A)
and
or
Suppose where
Then…
etc…
Such that:
Note
Note here, each state has dynamics that don’t depend on any other state besides itself. These are decoupled states and dynamics.
Here, we can solve 1st order differential equation rather than an order DE since the dynamics are decoupled and we can solve for the dynamics of an isolated state.
Defining a new set of states in a new coordinate system and
showing a decoupled state
etc…
Then
What is this intuitively telling us?
Definition
Define an eigenvalue as stable if and unstable otherwise.
State Space Realization for the DT Feedback System
For = and
For the plant…
- Choosing states:
- as a state for the DT feedback system
- where here is
- We are now expressing in terms of and the states, eliminating the other input signals
- Where we can do the same thing for