Also known as implicit invocaton. Used when components producing data/events do not directly know which other components will consume them.
The goal here is a “message broadcast” to multiple consumers. One published event can be consumed by multiple independent subscribers. This is used in event driven architecture.
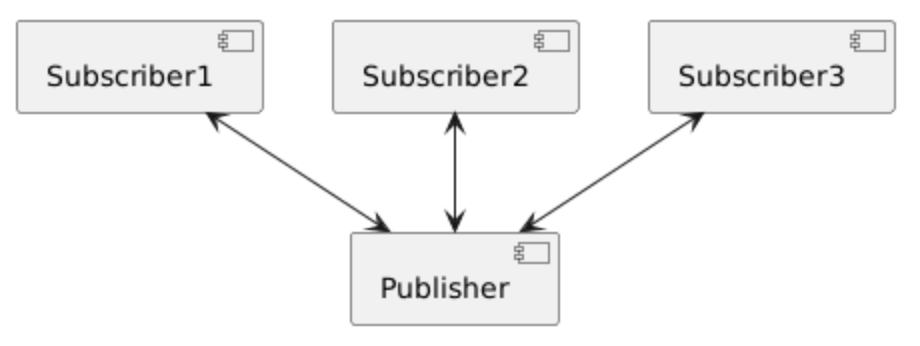
Components
- Publishers emit events and messages
- Subscribers register interest and react
- Connectors are the events and messages grouped by topic
This is used by ROS nodes.
Warning
The risk here is duplication. A message can be read or acted upon multiple times by different consumers since they are independent.
This is inherently a messaging pattern and related to Message Queue.
Pros and Cons
Pros:
- You can add and remove subscribers without changing publishers
- Async delivery and buffering can be scaled to handle spikes Cons:
- Hidden dependencies between components and unpredictable timing is a detriment to readability
- Debugging needs tracing and structured logging
Variants
Event based:
- Introduces a shared event bus, this is the pub sub that we thing of