Geometrical transformations that are described as a linear equation can be represented as Matrix Mappings.
Rotations
A rotation is an in-plane transformation from which rotates counterclockwise through angle to the image .
This is a linear mapping.
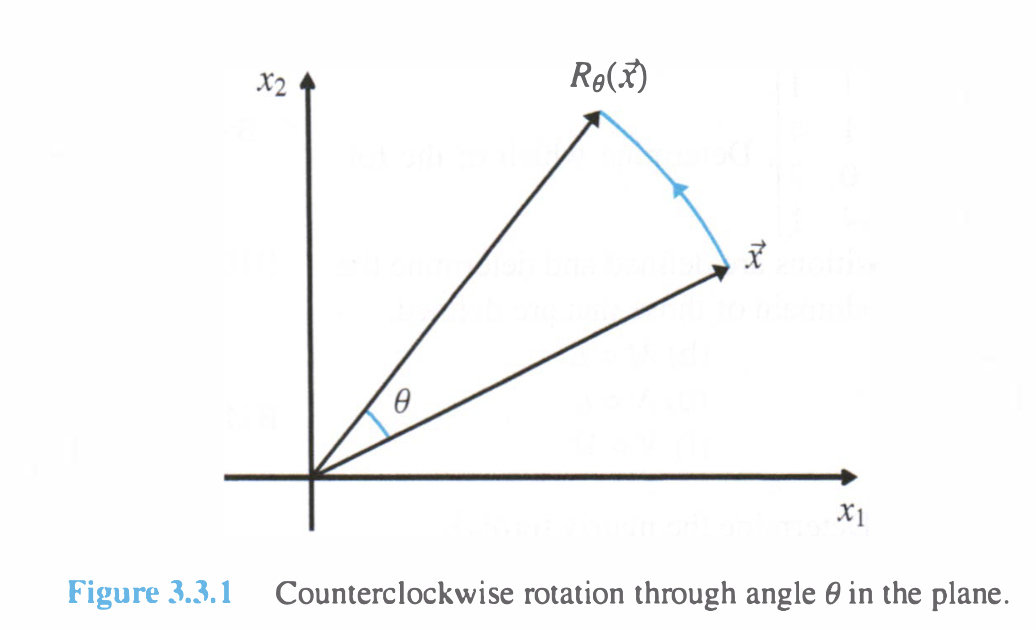
Using the basis of , we define the rotation matrix as .
In 3D
For a right handed standard basis, this rotation matrix can be extended to which is the transformation about the z axis. This idea can be adapted to rotate about the other axes.
Stretches
This is where all lengths in one particular direction are scaled by while all lengths in other directions are left unchanged.
This produced the following matrix…
Contractions and Dilations
This is just scaling and has the following matrix .
Shears
Sometimes a force applied to a rectangle will cause it to deform into a parallelogram. This change can be denoted by such that but . Therefore, .
Reflections
Let be a reflection across the -axis. Then every vector with a point above that axis is mapped by to a corresponding point in the image vector in the - direction.
This looks like .
We can also do this in three dimensions…
Therefore, performs a reflection about the plane (since the negative is in ).
The general equation for this is .