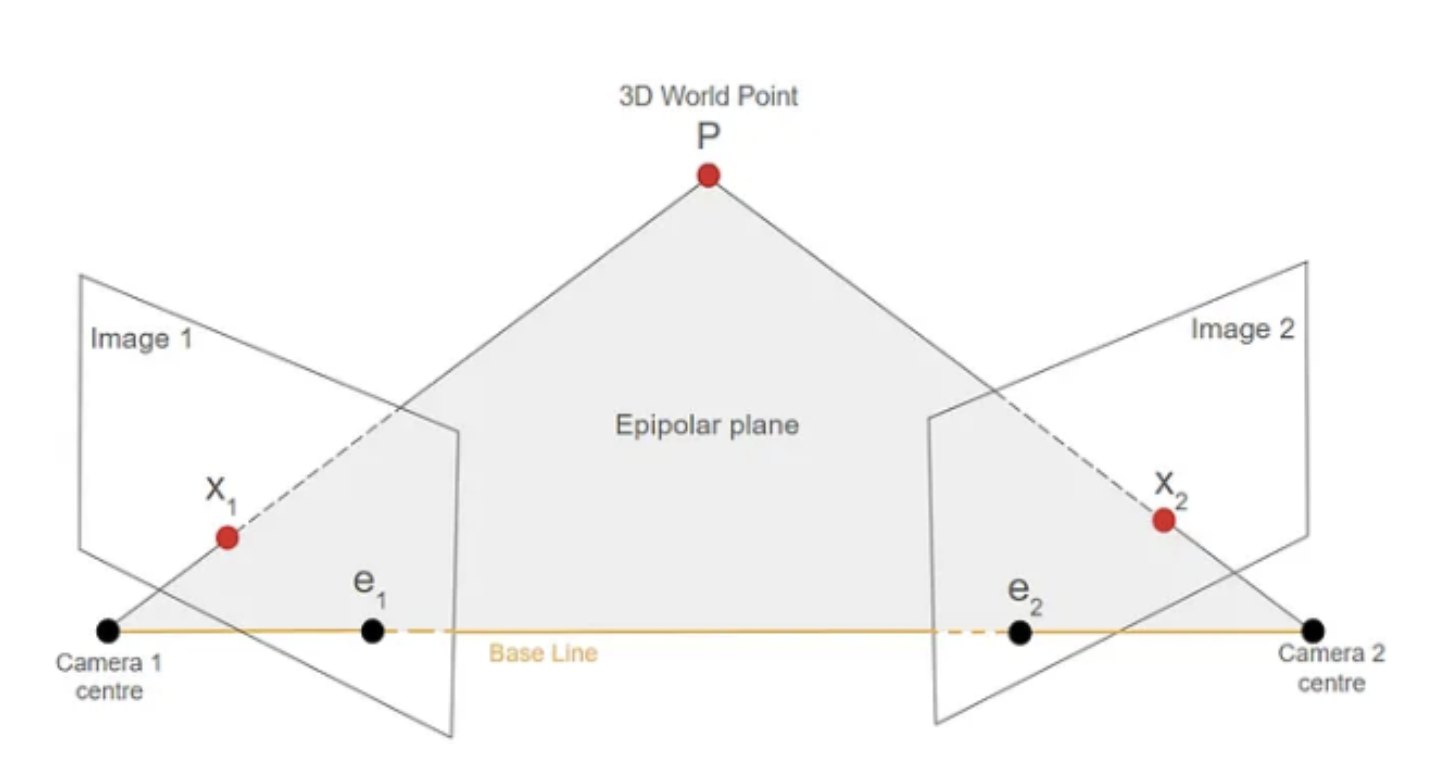
Triangulation in computer vision is the process of determining a 3D point’s location in space by observing a set of 2D projections (at least 2 images). This is very important for 3D reconstruction and stereo vision.
Requirements
min(2)images of the same scene- Calibrated camera extrinsics + intrinsics
Triangulation is projecting rays as pixels and finding where they intersect
OpenCV uses a pinhole camera model and the DLT Method and the view of a scene is found by projecting a scene’s 3D point into the image plane using a perspective transformation.
The projection matrix is given by which is actually the matrix but the same form is used for . is the rotation matrix, and is the translation vector that describes the change of coordinates from the world to the camera frame. The camera intrinsic matrix (also notated as ), is the same for 2D → 3D and the other way around as is defined as…
Where t is defined as
R can be extracted from MuJoCo if using a simulator as a flat array (where the 9 values of the 3x3 matrix are stored in data_->cam_xmat[0:9]).
Coordinate differences
There are slight differences between MuJoCo’s coordinate frame and OpenCV’s where you need to flip the Y positions and use -Z as forward
and are the center of the camera (the pinhole where the rays come from), and the focal lengths respectively.
In the real world, I believe a lot of this information will come from calibration.
#include <vector>
struct CameraIntrinsics {
cv::Mat K; // 3x3 intrinsic matrix
cv::Mat dist_coeffs; // distortion coefficients
};
struct CameraExtrinsics {
cv::Mat R; // 3x3 rotation matrix (world to camera)
cv::Mat t; // 3x1 translation vector
};
struct CameraPose {
CameraIntrinsics intrinsics;
CameraExtrinsics extrinsics;
cv::Mat P; // 3x4 projection matrix
};// MuJoCo cam_xmat columns are the camera's X, Y, Z axes in world coordinates
// Column 0: camera X axis (right)
// Column 1: camera Y axis (up)
// Column 2: camera Z axis (forward, which is -viewing direction in MuJoCo)
// OpenCV camera convention:
// X: right
// Y: down
// Z: forward (into the scene)
// Build rotation matrix for OpenCV convention
// We need to flip Y (MuJoCo up -> OpenCV down) and use -Z as forward
cv::Mat R = cv::Mat(3, 3, CV_64F);
// Row 0: camera X axis (right) - same in both
R.at<double>(0, 0) = cam_mat[0];
R.at<double>(0, 1) = cam_mat[3];
R.at<double>(0, 2) = cam_mat[6];
// Row 1: camera Y axis - flip (MuJoCo up -> OpenCV down)
R.at<double>(1, 0) = -cam_mat[1];
R.at<double>(1, 1) = -cam_mat[4];
R.at<double>(1, 2) = -cam_mat[7];
// Row 2: camera Z axis - negate (MuJoCo -Z forward -> OpenCV +Z forward)
R.at<double>(2, 0) = -cam_mat[2];
R.at<double>(2, 1) = -cam_mat[5];
R.at<double>(2, 2) = -cam_mat[8];