Used when the systems purpose is to maintain certain properties of a process output near a desired reference despite disturbances.
Components
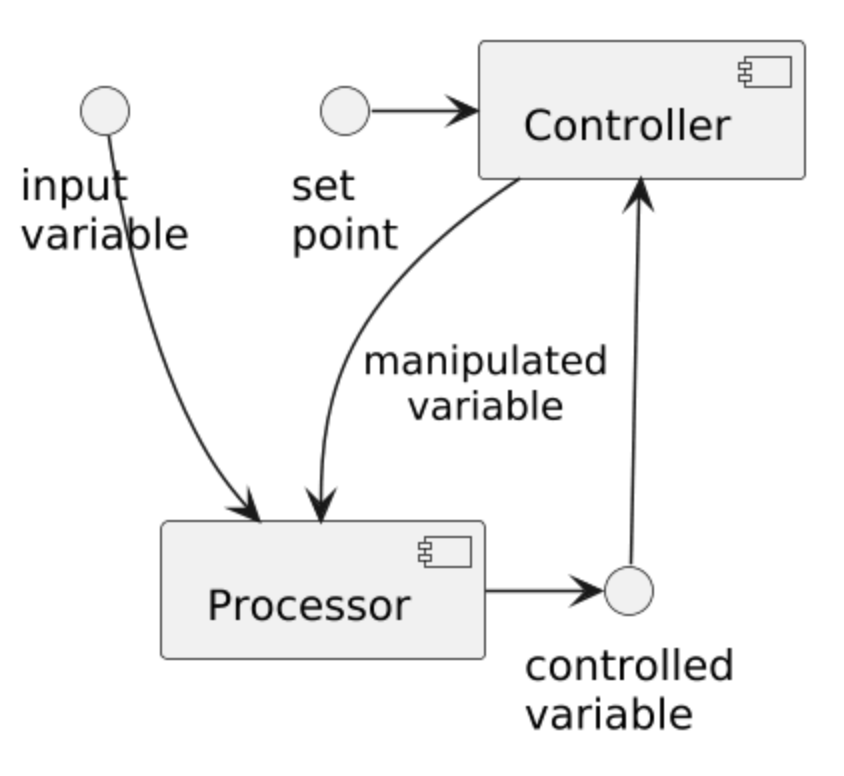
- Controller
- Computes action based on set point and observed state
- Process (Plant)
- The physical or software process being controlled
- Connectors are sensors or feedback or actuators
Pros and Cons
Pros:
- Cab adapt to changing conditions and keep the system in an acceptable state
- Supports self-correcting behaviour Cons:
- Requires monitoring, calibration, and control logic
- Delayed or noisy feedback can cause oscillation
- Incorrect control logic can be severe
Variants
I have studied a ton of control theory in undergrad.
Some notable example include:
- The Kubernetes controller and ArgoCD gitOps